東京電力福島第一原発で、廃炉に向けた作業の一部を人に代わって特殊な「ロボット」が担っています。炉心溶融が起きた原子炉建屋の中などは、いまでも放射線量が高く、人が入る作業が難しいためです。ただ、建屋内の状態は分からないことも多く、長期にわたる研究開発と現場投入の繰り返しが必要になります。
原子炉格納容器の中などで稼働するには、厳しい条件をクリアしなければいけません。中は暗く、水がしたたり落ちたり、水がたまっていたりする場所もあります。高い放射線によって機器が不具合を起こすため、短時間で作業を済ませないといけません。廃炉の技術開発などを担う国際廃炉研究開発機構(IRID)開発計画部の奥住直明部長は「半導体は放射線に弱く、カメラのセンサーなどは交換を前提にしなければいけない」と言います。
また、配管などの既存の機器類に加えてがれきも多く、動ける空間が限られる上、実際に投入して初めて状態が分かることも多いのです。障害物に乗り上げて動けなくなり、建屋内から戻れなくなったロボットがありました。人が回収するのも難しく、「置き去り」になることもあります。
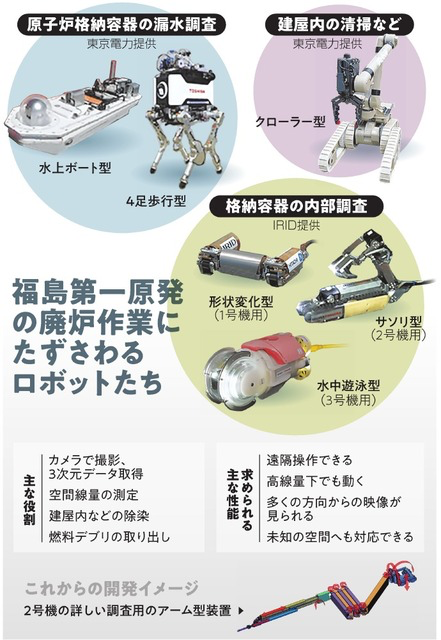
遠隔で操作できるロボットに求められる主な役割は、カメラでの映像撮影や空間線量の測定などの調査と、事故で放射性物質が飛散した建屋内の除染や溶け落ちた核燃料(デブリ)の取り出しなどの作業です。
□ □
初期に使われたのは、除染するロボットです。高圧水やドライアイスを床や壁に吹きかけ、線量を下げようとしました。しかし建屋内は配管などで複雑な構造になっていることから十分な効果は発揮できませんでした。
建屋内の調査では、格納容器のどこから水が漏れているのかなどを調べました。使われたのは、水上を進むボート型や4足歩行型のロボットなどです。
デブリがあるとみられる1~3号機の格納容器内を調べるロボットも開発されました。廃炉の山場となるデブリの取り出しに向けて、位置の特定や取り出し方の検討に必要になるからです。
取り出すには、吸引や切断などさまざまな方法が必要になると考えられています。デブリは一様にとどまっていないので、散らばり方や形状の調査と並行して開発を進めなければいけません。
□ □
これまでデブリに関する調査が最も進んでいるのは2号機です。2017年に内部の情報を集めて、18年にはデブリと見られる物質を確認しました。今年2月の調査では、小石状の堆積(たいせき)物をつかむこともできました。
また、3号機は格納容器の底から6メートル以上の高さまで水があるため、潜水艦のように水中を進むロボットが開発されました。17年の調査でデブリと見られる物質が見つかっています。
一方、1号機は15年と17年にロボットで調査していますが、格納容器中心部の真下には入れておらず、デブリは未確認です。
原子力損害賠償・廃炉等支援機構が公表した「廃炉のための技術戦略プラン」では、21年に最初のデブリ取り出しを始めるのは「2号機が適切」と評価しました。取り出しに向けた詳しい調査のため、遠隔操作するアーム式の装置を検討しています。
福島第一原発の廃炉技術を助言している東京大の浅間一教授(ロボット工学)は「いまは事故直後に比べると少し安定な状態になっている。廃炉の工程をしっかり考え、開発に長期間かかっても、じっくり取り組むことが重要だ」と指摘します。
これから
事故から8年半が過ぎ、炉心溶融が起きた福島第一原発の原子炉建屋内の状況がロボットなどを通じて見えつつあります。映像や放射線量などのデータは、廃炉のためのさらなる開発に活用される貴重なものです。非常に困難な道のりを一歩一歩進む中で、技術革新にも期待したいと思います。【朝日新聞】